Follow Me: real-time in the wild Person Tracking
Application for Autonomous Robotics
Thomas Weber, Sergey Triputen, Michael Danner, Sascha Braun, Kristiaan
Schreve, and Matthias Rätsch
Abstract. In the last 20 years there have been major advances in autonomous
robotics. In IoT (Industry 4.0), mobile robots require more
intuitive interaction possibilities with humans in order to expand its field
of applications. This paper describes a user-friendly setup, which enables
a person to lead the robot in an unknown environment. The environment
has to be perceived by means of sensory input. For realizing a cost and resource
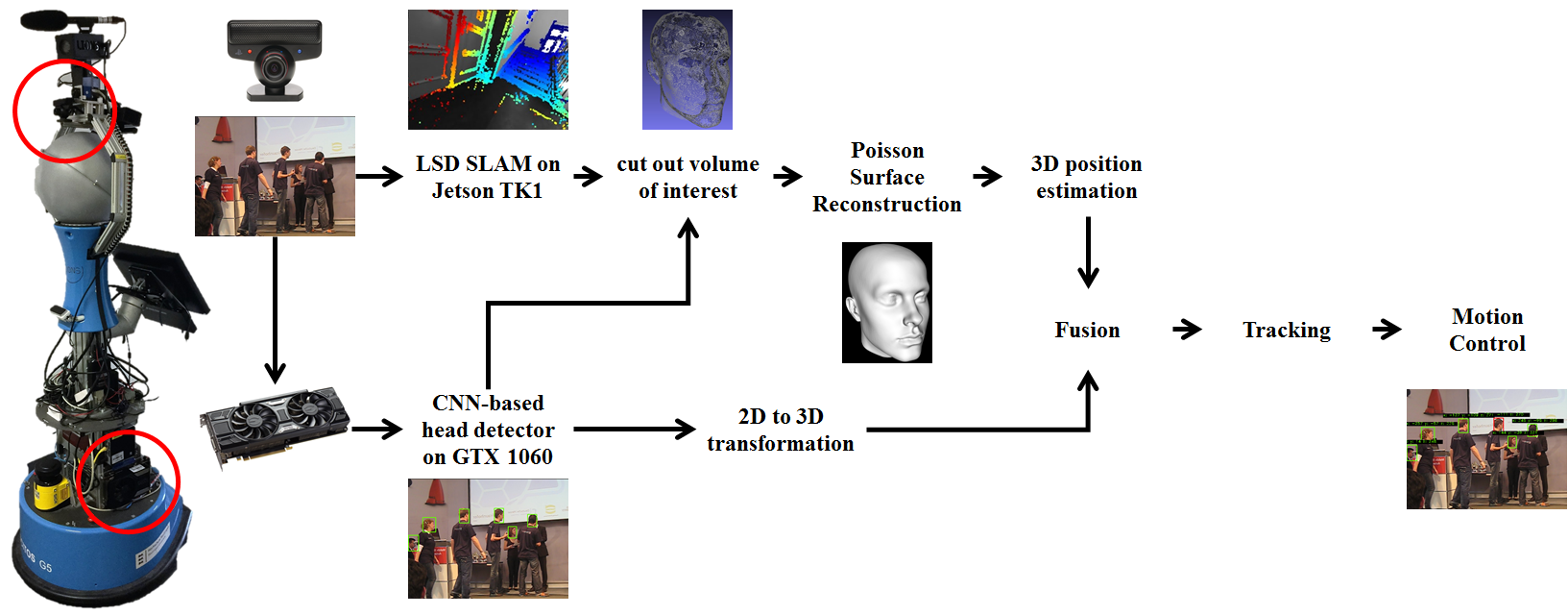
efficient Follow Me application we use a single monocular camera
as low-cost sensor. For efficient scaling of our Simultaneous Localization
and Mapping (SLAM) algorithm, we integrate an inertial measurement
unit (IMU) sensor. With the camera input we detect and track a person.
We propose combining state of the art deep learning with Convolutional
Neural Network (CNN) and SLAM algorithms functionality on the same
input camera image. Based on the output robot navigation is possible.
This work presents the specification, workflow for an efficient development
of the Follow Me application. Our application’s delivered point
clouds are also used for surface construction. For demonstration, we use
our platform SCITOS G5 equipped with the afore mentioned sensors.
Preliminary tests show the system works robustly in the wild.